- 程序有所改变。发帖如还有问题请报告
- 【征集】西西河的经济学,及清流措施,需要主动参与者,『稷下学宫』新认证方式,24年网站打算和努力目标
主题:【原创】汽车安全技术杂谈-主动安全技术(序) -- 波波粥
前文说ACC系统有向汽车自动驾驶仪方向发展的趋势,对于汽车行驶来讲,除了周围的交通环境,汽车“脚”下的道路状况也很重要,不然哪天马路上挖一大坑,我的雷达还没告警呢,车子就一头栽了进去,岂不是。。。。。。

所以道路感知能力对行驶安全也极其重要,为此,工程师们开发了道路保持系统(LKS,Lane Keeping System)和路面扫描系统(PSS, Pre-Scan System)。其中道路保持系统可以单独使用,也可以和路面扫描系统结合起来使用。
道路保持系统最基本的构想就是让汽车沿着规划好的道路来行驶,特别是在高速公路上的长距离行驶,可以极大的减轻驾驶员的负担。汽车车道保持功能包括汽车偏离车道警示功能和自动保持汽车在当前车道行驶功能两个方面。汽车车道保持系统主要是利用车载CCD摄像机或车载传感器等获得前方车道路况,并以此控制汽车的行驶方向,使汽车自动地行驶在当前车道上。
一种方法是不依赖于道路上的附加设备,只使用汽车自带的摄像系统(如CMOS摄像头)通过图像处理算法,可以求出车道和车辆的相对运动关系。系统就好像可以“看见”车道的走向和车辆的行驶方向。如果报警算法检测到车辆即将驶离现在的车道,系统会自动切换到转向系统,刹车系统等,来实现对汽车行驶的控制,还可以通过触觉、动作或声音反馈警告驾驶员,切换到人工模式。
另一种更加直接的方式是使用某种探测设备,结合道路上使用的辅助系统,让汽车直接感知到和与预设道路的偏差。最初工程人员的构想很简单,在高速公路普遍使用有反光材料,以利于夜间驾驶

工程师们希望使用某种设备,来利用这些现有的或者“升级换代”之后的反光材料,使得汽车可以感知道路状况和路面状况。
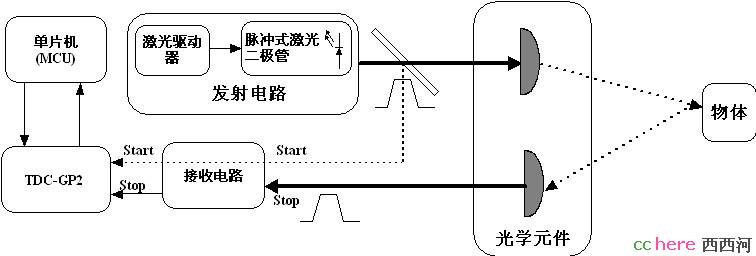
为此开发了一些红外线材料,用车上的红外大灯来发出红外线,通过接受反射的红外线来计算道路状况。不过通过费用,效果的比较,最终还是直接使用激光传感器的更加直接有效。激光传感器的原理和激光测距仪一样,通过在道路两旁设置激光反射装置,汽车携带的激光发生器不断的发出激光束,再接受反射光束,通过计算可以知道与预设道路的偏差。
激光测距的原理图:
有了激光传感器这个强大的工具之后,工程师们为它找到了一个新用途,那就是路面扫描系统(PSS, Pre-Scan System)。奔驰的F700首次使用了这一系统。
Mercedes-Benz F700

呵呵,大家是不是想到激光三维扫描系统了啊?
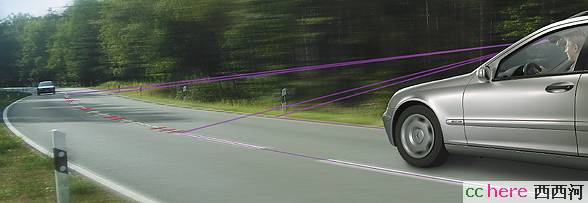
这个三维扫描很好很强大,不过呢,银子也是要大大的哦。现在在汽车上使用的激光传感器还没有这么复杂。汽车在车头位置安装两个激光传感器,激光束依照扫描角度差值(如0.5度),依次扫向路面,由于这些激光束和路面的交汇角(有没有更贴切的名字啊? )不同,每一束激光经过路面反射后都回产生自己的特征分布。激光传感器赋予每束激光一个特征值,由于道路状况的不同(如起伏程度),造成每束激光与路面的交汇角一直处于变化中,这个特征值也处于变化中,通过计算后可以知道前方道路状况,比如前面有上坡路段,那么油门,自动变速箱会自动调整;如果前方道路上有障碍,会启动转向/刹车系统,来避开障碍物。呵呵,在这个时候,就要和道路保持系统打个招呼了,“兄弟,前面有大坑,您就别保持既定路线了,现在轮到俺来接管控制系统了”,如果LKS牛鼻子朝天,呵呵,那就好玩了。
)不同,每一束激光经过路面反射后都回产生自己的特征分布。激光传感器赋予每束激光一个特征值,由于道路状况的不同(如起伏程度),造成每束激光与路面的交汇角一直处于变化中,这个特征值也处于变化中,通过计算后可以知道前方道路状况,比如前面有上坡路段,那么油门,自动变速箱会自动调整;如果前方道路上有障碍,会启动转向/刹车系统,来避开障碍物。呵呵,在这个时候,就要和道路保持系统打个招呼了,“兄弟,前面有大坑,您就别保持既定路线了,现在轮到俺来接管控制系统了”,如果LKS牛鼻子朝天,呵呵,那就好玩了。
汽车上越来越多的驾驶辅助系统,对整车的控制系统要求越来越高了,由此提出了车辆神经网络控制的概念。
 下回再说
下回再说
- 相关回复 上下关系8
🙂方向盘转角控制器包括两个控制回路 jack 字73 2008-07-23 14:16:49
🙂【原创】主动安全技术-自适应巡航控制系统(中)

🙂好文送花~ exon 字78 2008-07-20 10:57:58
🙂汽车的主动还是相对主动,系统要TAKE OVER 驾驶员控制汽车 karman 字58 2008-07-19 10:04:05
🙂目前应用中的主动安全技术 2 波波粥 字230 2008-07-19 10:18:24
🙂向全自动方向发展是“终极目标”么 1 波波粥 字463 2008-07-19 10:10:16