- 发帖可能变空内容,邪门暂不知所以然
- 『稷下学宫』新认证方式,24年网站打算和努力目标
主题:聊聊 GOOGLE 无人驾驶汽车 -- 雷达
前几天河友okcgb 提到google无人驾驶车的一些情况,勾起我的兴趣,在网上作了一些初步的了解,在这里聊聊,欢迎指教。
1.概况
偷个懒,基本信息就先引用维基百科:
Google Driverless Car是谷歌公司的 Google X 实验室研发中的全自動駕駛汽車,不需要驾驶者就能启动、行驶以及停止。目前正在测试,已驾驶了48万公里。项目由Google街景的共同发明人塞巴斯蒂安特龙(Sebastian Thrun)领导。谷歌的工程人员使用7辆试验车,其中6辆是丰田普锐斯,一辆是奥迪TT。这些车在加州几条道路上测试,其中包括旧金山湾区的九曲花街。这些车辆使用照相机、雷达感应器和激光测距机来“看”其他的交通状况,并且使用详细地图来为前方的道路导航。谷歌说,这些车辆比有人驾驶的车更安全,因为它们能更迅速、更有效地作出反应。然而,在所有的测试中,都有人坐在駕駛座上於必要時可以随时控制车辆。2012年4月1日,Google展示了他们的使用自动驾驶技术的赛车,命名为10^100(十的一百次方,也就是googol,"google"这个单词的词源) 2012年5月8日,在美国内华达州允许无人驾驶汽车上路3个月后,机动车驾驶管理处(Department of Motor Vehicles)为Google的无人驾驶汽车颁发了一张合法车牌。为了醒目的目的,无人驾驶汽车的车牌用的是红色。
** 48万公里是2012年的驾驶里程,现在应该多得多。
2.原理
Google Driverless Car使用照相机、雷达和激光测距机(Lidar)作为传感器,使用GPS定位,没有方向盘,油门,刹车,由控制系统直接操纵车轮做前进/后退/转弯。(Fig 1)
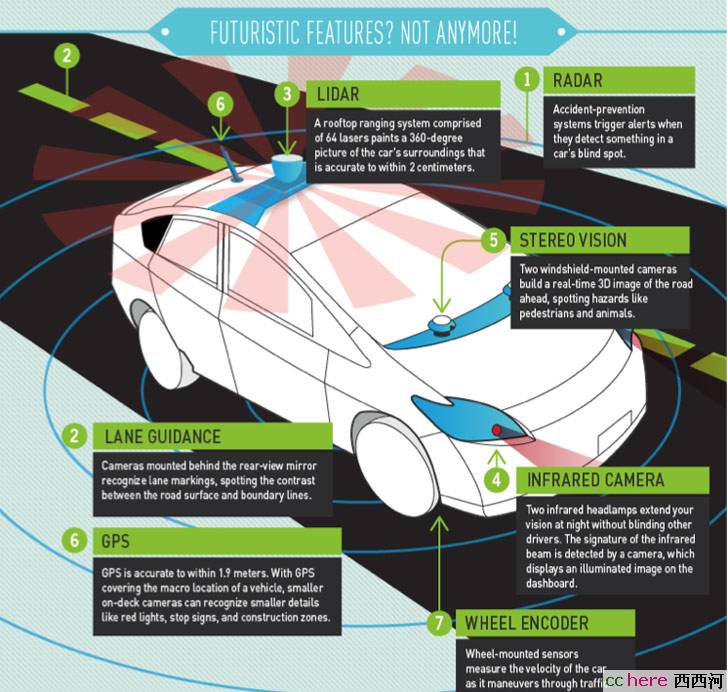
(1)在前后左右各个方面安装四到六个射频雷达。基于多普勒速度,雷达可以测出移动的物体,主要用于检测前后远处行驶中的车辆。车载防撞雷达的技术已经很成熟,目前大多使用频率20G级左右的FMCW体制,也有使用频率更高的毫米波雷达。
(2)车道引导摄像机。用于检测汽车运行轨迹与分道线之间的差距,保证汽车一直行驶在本车道之内。
(3)激光雷达LIDAR,这大概是最重要的设备。WIKI叫它激光测距机,实际上它的功能不是简单的测距,而是基于连续测距实现三维立体成像。射频雷达只能检测到金属物体,而激光雷达可以检测到周围近距离360度范围内的所有物体,不论是车辆,树木还是行人。下面是一个激光成像的仿真效果图。(Fig 2)
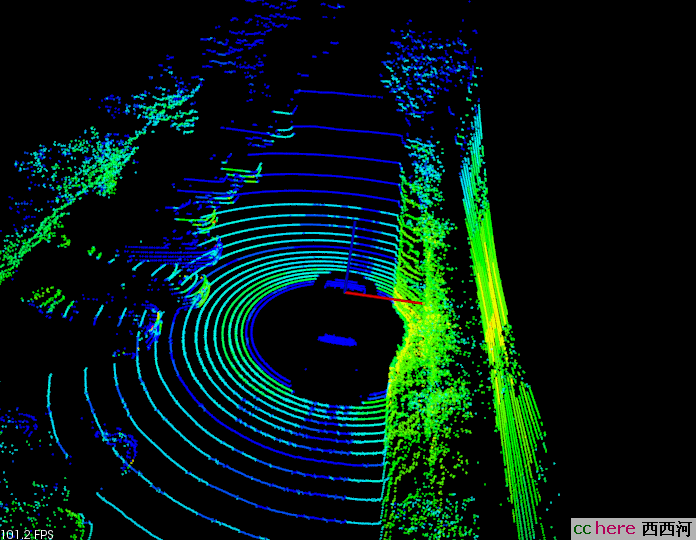
后面我会对激光雷达做更详细解读。
(4)两组红外摄像机,安装在车灯处,用于夜间检测。
(5)两只立体相机,实现对前方物体的三维成像,用于检测前方突然出现的障碍,如行人,动物等等。
(6)GPS,精度达到两米,除了用于导航,更重要的是与高精度地图以及摄像机配合,监测前方的红灯,停牌等已知的地面标识。
(7)车轮传感器,使车辆实现机动的关键。
3.激光雷达
激光雷达是最重要也最昂贵的设备,所以在这里单独做一些介绍。
首先,激光测距的基本原理和射频雷达是一样的:向目标发射电磁波或者激光,然后接收反射回来的信号,测量电磁波在空气中传播的时间,乘以光速除以二,就是雷达与目标之间的距离。
想像一下,如果我们将激光雷达在固定位置向固定目标连续发射测量,那么将得到误差范围内固定的一个距离值。
进一步,如果将激光雷达安置在可以旋转或者移动的设备上,在连续发射测量的同时,直线直线旋转/移动扫描,那么我们将得到一个二维图谱,其横坐标表示旋转角度或者移动距离,纵纵坐标是测得的目标距离 。在实际工作中,激光雷达的扫描,是通过其内部一个可旋转摆动的反射镜来实现,不需要移动激光雷达本身。
再进一步,如下图所示(Fig 3),将激光雷达安装在飞机上,在与飞行速度垂直的方向上做线性往复扫描,同时由于飞机自身的运动,在地面上形成锯齿状的扫描轨迹。连续测量目标距离以及做坐标变换后,可以得到三维图像,X/Y轴是目标的坐标,Z是距离(高度)值。
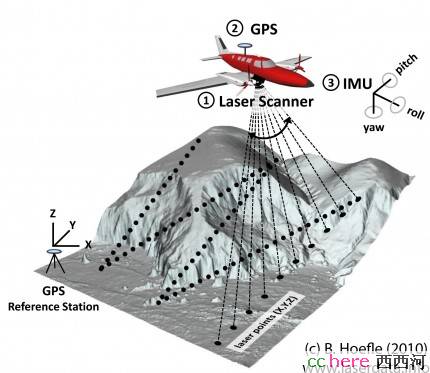
激光雷达三维图像的分辨率,主要取决于 激光波束发散角,激光脉冲重复频率,扫描频率,飞行速度,以及飞行高度等等。成像算法中很重要的一部分是对飞行航迹和飞行姿态偏差引起的畸变做校正, 所以高精度三维激光雷达中必须配备高精度的惯性测量装置(IMU)和GPS.
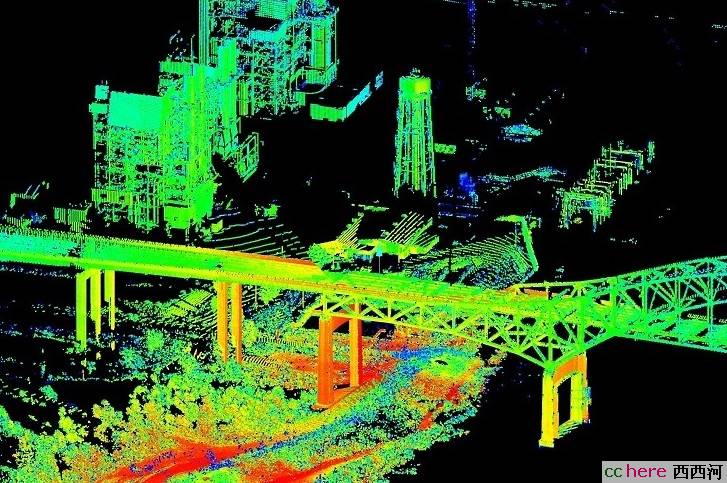
机载激光雷达三维图像的一个实例(Fig 4)。
类似的原理可以实现车载激光雷达三维成像(Fig 5)。
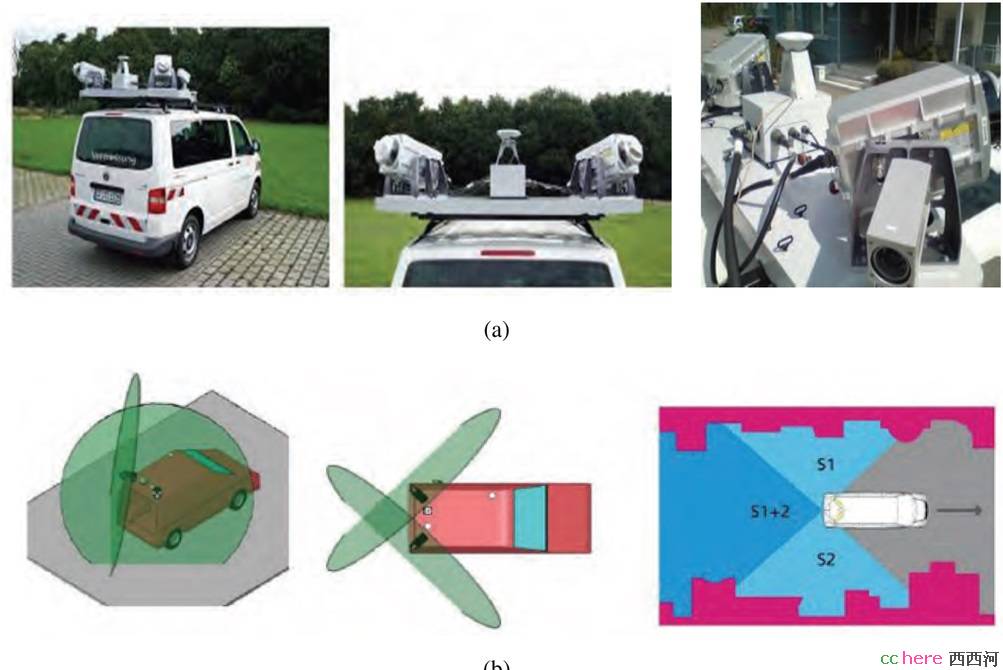
将激光雷达安装在汽车顶部可以水平旋转的平台上,工作过程中激光自身做垂直方向的线性扫描,同时激光雷达整体在水平方向匀速旋转,这样就可以得到近距离的三维图像。(Fig 6)

从上面这个效果图可以看到,道路上斑马线以及分道线都显示出来了。这是近距离激光三维成像的一个特点,除了可以采集距离信息之外,也可以像射频雷达一样基于反射回波强度的不同将不同性质的目标分辨开来。
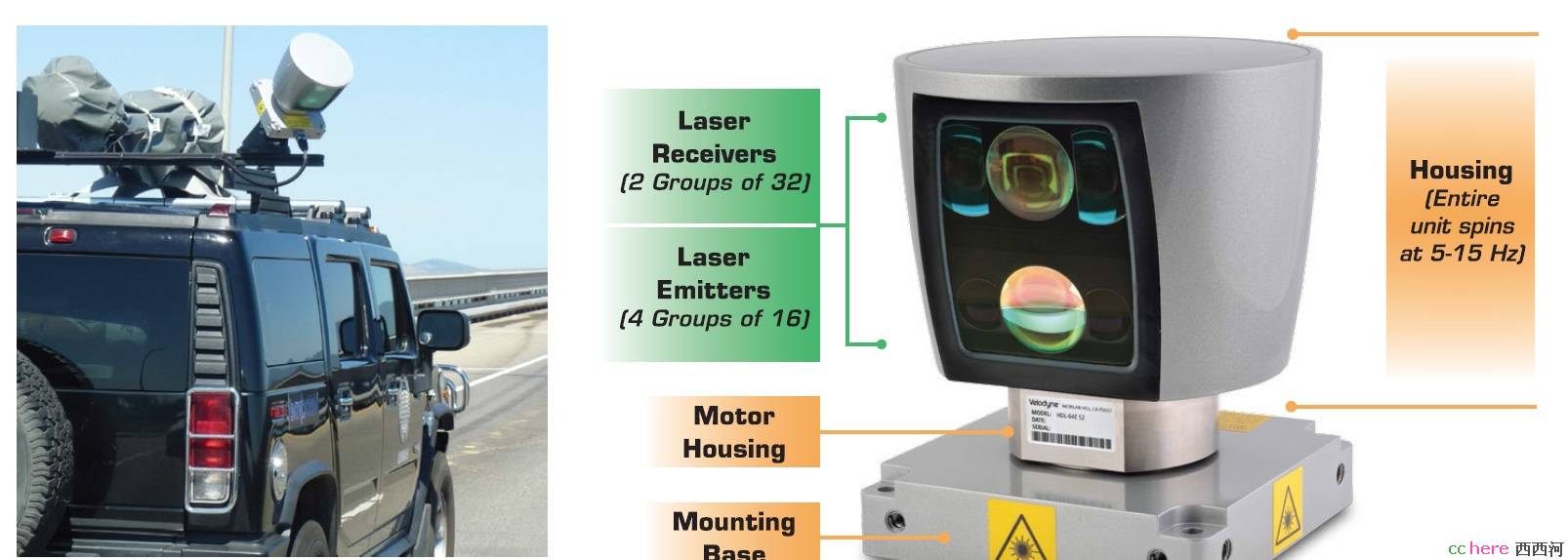
回到Google Driverless Car,它采用的车载激光雷达是 Velodyne公司的专利产品。
上面讲到的车载激光雷达使用1个激光波束配合可往复摆动的反射镜做线性扫描。而Velodyn的车载激光雷达却使用了64个激光波束形成阵列,配合64路独立的光学接收通道,实现高精度的扫描。换言之,传统的车载激光雷达的基本元素是点,由点成线,由线成面。而Velodyn直接生成一小块反射面,然后水平旋转将连续的小反射面拼成完整的三维图像。要知道每一路发射接收通道都是一个精密的光学系统,需要独立的激光头,光电转换器,以及一系列的透镜。将64路激光通道,安装在那么小的区域内,而且要保证激光通道之间不相互干涉干扰而正常工作。这个真的很厉害!
4.成本价格
谷歌汽车还没有正式上市,所以现在不知道真正的价格是多少。查到的一种说法是预计15万刀左右一台,其中最贵的设备就是激光雷达,大概要七万多。如果真的是这个价格的话,要想打败传统汽车,还是有一点偏贵。但是如果考虑到它所采用的技术设备,那么15万并不算贵。比如激光雷达,前面提到的机载激光雷达一台要150万左右。传统的车载激光雷达也要五六十万美金。Velodyne雷达卖七万刀,可以说是业界良心了。当然它的精度肯定不会很高(当然也不需要很高),要知道与机载激光雷达配套的高精度IMU一台就要十几万刀。
5.问题与挑战
首先是功能的实现。可以想像,无人汽车中心控制计算算法工作量会很大。需要实时综合各类传感器传递过来的信息,引导汽车作出正确的举动。由于实际的路况十分复杂,会有各种各样不同性质的目标以及不同的问题。比如在All Way Stop路口,如果对面和左右都有车辆,还有行人,那么情况就比处理简单的停牌要复杂的多。再比如在高速公路上切换车道,旁边是小车或者大卡车,或者是大卡车前面有小车,情况都不一样。
然后是可靠性。在高速公路上以一百多公里时速飞奔的汽车,如果主控计算机出了问题死机重启,那必然是灾难性的,谁碰上谁倒霉。再者汽车需要适应各种气候条件,比如激光雷达在雨雪雾等潮湿天气下性能会差很多。某些波长的激光雷达,在雨雪天最坏的情况下检测距离只能达到正常值的一半。
6.几句题外话
近年来经常看到种种评论,关于美国正在衰落中国正在崛起之类。说实话,近几十年中国确实在大大的发展,可是每当我接触到老美的新技术新产品的时候,作为一个工科男我就想说,路还长着呢! 类似上面Velodyne这样的小公司,在美国多如牛毛!
更关键的是,谷歌的创始人发了财,享受财富之余会投资技术领域,去搞无人汽车,智能眼镜,高空风力发电等等…有些技术或者产品可能永远也实现不了但他们还是愿意投钱去做。而中国的富豪们在干什么呢?泡小明星,买名画,买球队…或者就是不断的扩张,不断的赚钱,什么赚钱快干什么。别人就罢了,像李彦宏,张朝阳这样名校出身的工科男,发了财以后是不是应该向谷歌学点什么呢?
本帖一共被 1 帖 引用 (帖内工具实现)
- 相关回复 上下关系8
🙂聊聊 GOOGLE 无人驾驶汽车

🙂Lidar可以看到颜色是怎么实现的 2 领班军机 字261 2015-09-27 02:28:16
🙂你说的是对的 3 雷达 字233 2015-09-27 08:37:59
🙂最新消息,谷歌完成第一辆全功能无人驾驶汽车 1 雷达 字231 2014-12-23 09:02:51
🙂美国的四桨微型无人机 5 本嘉明 字243 2014-12-07 10:43:21
🙂都依靠GPS的话就是所有的车都走一条路 曾自洲 字35 2015-09-28 01:42:22
🙂这个好厉害 2 雷达 字336 2014-12-07 20:01:29
🙂作为理科男,俺也是这么觉得,不服不行啊。美国的 2 关中农民 字180 2015-09-27 09:17:43